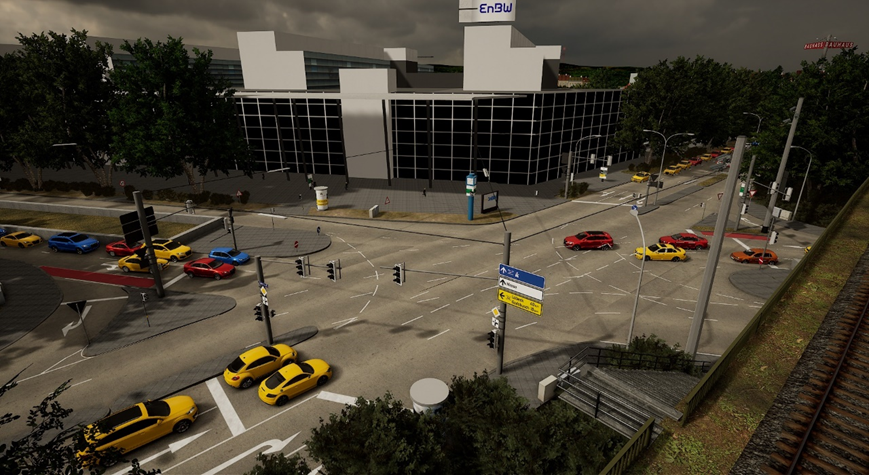
Autonomous vehicles create the need to observe and model the behaviour of the ‘machine – driver’, consisting of various sensors exchanging information and acting according to the road context. Various DBMs have been proposed in the literature and have formulated the basis for modelling AVs and CAVs in the various simulation software. The existing research is mainly focusing on modelling the behaviour of autonomous vehicles concerning their interaction with the surrounding traffic (i.e. vehicles) in terms of the keeping distance from their preceding vehicles and the side distances from the vehicles on their right and left side. The investigation of the interaction of autonomous vehicles with other road users is still in its infancy. Especially, the interaction with vulnerable road users, such as pedestrians, is currently under research and it gains increasing attraction as it is a major pilar in road safety. This work aims to fulfil the need of the development of an additional behavioral model describing the safe interaction between an autonomous vehicle and a pedestrian standing on the curb aiming to cross the road. For this purpose, data were collected through a virtual reality experiment where a human user immersed into the scene as a pedestrian with the aim of crossing the road at an unmarked location. At the same time, a simulated vehicle was approaching, controlled by a highly automated driving function. The behavioural model developed is based on the principles of inverse reinforcement learning and the algorithm implemented is the Maximum Entropy (ME) algorithm which assumes optimum behaviour, and the expert behaviour is modelled as the one with the maximum entropy.
| ID | pc513 |
| Presentation | |
| Full Text | |
| Tags |